
Fil:Tackle principle.png

{kind=link}
{kind=link}
{kind=link}
Fuld opløsning (1.000 × 4.000 billedpunkter, filstørrelse: 657 KB, MIME-type: image/png)
|
|
Denne fil er fra Wikimedia Commons. Beskrivelsen af filen fra Commons er gengivet nedenfor. |
{kind=link}
Beskrivelse
| Beskrivelse |
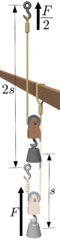
Shows the principle, forces and traveling distances in a basic tackle. Rendered using POV-Ray (see http://www.povray.org/) and the scene description code shown below. This image comes complete with annotations; letters, numbers and arrows. Because of this, rendering this image with POV-Ray requires the free TrueType fonts "cmr10.ttf" (Computer Modern Roman) and "cmmi10.ttf" (Computer Modern italics) either in the same directory as the .pov or installed globally on the computer. The scene description assumes that the image is four times as tall as it is wide! When rendering, remember to specify the width and height of the rendering accordingly. |
| Dato | 15. april 2005 (original upload date) |
| Kilde | No machine-readable source provided. Own work assumed (based on copyright claims). |
| Forfatter | No machine-readable author provided. Peo~commonswiki assumed (based on copyright claims). |
Licensering

|
Tilladelse er givet til at kopiere, distribuere og/eller ændre dette dokument under betingelserne i GNU Free Documentation License', Version 1.2 eller enhver senere version udgivet af Free Software Foundation; uden et invariant afsnit, ingen forsidetekster, og ingen bagsidetekst. En kopi af licensen er inkluderet i afsnittet GNU Free Documentation License. |
| Denne fil er udgivet under Creative Commons Kreditering-Del på samme vilkår 3.0 Ikke-porteret-licensen. | ||
| ||
| Denne licens blev tilføjet som en del af GFDL-licensopdateringen. |
POV-Ray scene description for this image:
/*
================================================
Demonstrating the principle of the basic tackle
------------------------------------------------
Created by Søren Peo Pedersen - see my user page
et http://da.wikipedia.org/wiki/Bruger:Peo
================================================
*/
#macro WoodTxt(WhiteOut) // Wood texture with specified
pigment { // degree of "whiting out"
wood
color_map {
[0 color rgbt <.9+.1*WhiteOut,.7+.3*WhiteOut,.5+.5*WhiteOut>]
[1 color rgbt <.7+.3*WhiteOut,.5+.5*WhiteOut,.4+.6*WhiteOut>]
}
scale .1
turbulence .05
translate <2,0,-1>
}
finish {ambient .4+.3*WhiteOut}
#end
#macro RopeTxt(WhiteOut) // Texture for ropes, with specified "whiting out"
pigment {color rgb <1+.0*WhiteOut,.9+.1*WhiteOut,.6+.4*WhiteOut>}
finish {ambient .4+.3*WhiteOut}
#end
#macro Tackle(WhiteOut) // Renders the tackle, weight and parts of the rope
#local WheelSideCut=difference {
cone {<0,0,.03>,.35,<0,0,.13>,.45}
cone {<0,0,.3>,0,<0,0,-.3>,.6}
}
#local MetalTxt=texture { // Metal texture for hooks and weight
pigment {color rgb .5+WhiteOut/4}
finish {
ambient .4+.2*WhiteOut
reflection rgb .3
metallic
}
}
merge {
difference {
box {<-.45,-1,-.3>,<.45,.5,.3>} // "body" of tackle
box {<-1,-.5,-.1>,<1,1,.1>} // The "gap" for the wheel
plane {<3,-1,0>,-.3} // Left "slanted" side
plane {<-3,-1,0>,-.3} // Right "slanted" side
texture {WoodTxt(WhiteOut) rotate <90,0,0>}
}
difference { // Wheel in the tackle
cylinder {<0,0,-.09>,<0,0,.09>,.5} // "Body" of the wheel
torus {.5,.07 rotate <90,0,0>} // Groove for the rope
#object {WheelSideCut} // Cut-aways on both
#object {WheelSideCut scale <1,1,-1>} // sides of the wheel
texture {MetalTxt}
translate <0,.25,0>
}
cylinder {<0,.25,-.4>,<0,.25,.4>,.1 // Axle through
texture {MetalTxt} // wheel and tackle
}
sphere_sweep {b_spline,7 // Hook on the tackle
< 0,-0.7,0>,.1
< 0,-1 ,0>,.1
< 0,-1.2,0>,.1
< .3,-1.5,0>,.09
< 0,-1.8,0>,.08
<-.3,-1.5,0>,.06
<-.3,-1.2,0>,.04
texture {MetalTxt}
}
merge { // Weight attached to the hook
difference { // Round part of attachment ring
torus {.2,.1 rotate <0,0,90>}
plane {<0,1,0>,0}
translate <0,-1.75,0>
}
cylinder {<0,-1.75,-.2>,<0,-1.85,-.2>,.1} // Straight parts of
cylinder {<0,-1.75, .2>,<0,-1.85, .2>,.1} // attachment ring
cone {<0,-1.85,0>,.4,<0,-2.8,0>,.6} // "Body" of the waight
texture {MetalTxt}
}
merge { // Rope around the wheel in the tacle
difference {
torus {.5,.07 rotate <90,0,0>}
plane {<0,-1,0>,0}
}
cylinder {<.5,0,0>, // Straight part of rope on right side of wheel
<.5,#if (WhiteOut=0) 1 #else 6 #end,0>,.07
}
translate <0,.25,0>
texture {RopeTxt(WhiteOut)}
}
cylinder { // Free end of rope on left side of the wheel
<-.5,.25,0>,<-.5,#if (WhiteOut=0) 7 #else 1 #end,0>,.07
texture {RopeTxt(WhiteOut)}
}
union { // Free end of the rope with the hook with ring attached:
merge { // Knot and loop at the free end of the rope:
#local Count=0; // The knot
#while (Count<5)
torus {.1,.07 translate <-.5,1.45-.14*Count,0>}
#local Count=Count+1;
#end
difference { // Part of rope loop bent around the hook
torus {.15,.07}
box {<-1,-1,0>,<0,1,1> rotate <0,-30,0>}
box {-1,<0,1,0> rotate <0,30,0>}
rotate <0,0,90>
translate <-.5,1.8,0>
}
cylinder { // Straight part of rope loop, away from viewer
<0,0,.15>,<0,-.4,.15>,.07
rotate <30,0,0> translate <-.5,1.8,0>
}
cylinder { // Straight part of rope loop, towards viewer
<0,0,-.15>,<0,-.4,-.15>,.07
rotate <-30,0,0> translate <-.5,1.8,0>
}
texture {RopeTxt(WhiteOut)}
}
merge { // Hook with ring at the free end of the rope
sphere_sweep {b_spline,7 // The hook itself
<-.5,2.8,0>,.1
<-.5,2.5,0>,.1
<-.5,2.3,0>,.1
<-.2,2 ,0>,.09
<-.5,1.7,0>,.08
<-.8,2 ,0>,.06
<-.8,2.3,0>,.04
}
torus {.2,.1 rotate <90,0,0> translate <-.5,2.72,0>} // The ring on the hook
texture {MetalTxt}
}
#if (WhiteOut=0) // Using WhiteOut property to specify the length of the
translate <0,6,0> // free end of the rope, and hence the knot and hook
#end
}
}
#end
#macro LengthArrow (Length,NameSymbol) // Double arrow with symbol for indicating lengths
#local ArrowHead=difference {
box {<-1,-1,-.001>,<0,0,.001> rotate <0,0,45> scale <1,3,1>}
plane {<0,1,0>,-.5}
}
merge {
box {<-.5,-.01,-.001>,<.5,.01,.001>}
#object {ArrowHead scale <1,-1,1> translate <0,.01,0>}
box {<-.01,.51,-.01>,<.01,Length-.51,.001>}
#object {ArrowHead translate <0,Length-.01,0>}
box {<-.5,Length-.01,-.001>,<.5,Length+.01,.001>}
#object {NameSymbol
translate <0,
Length/2+(min_extent(NameSymbol).y-max_extent(NameSymbol).y)/2
,0>
}
pigment {color rgb 0}
no_shadow
no_reflection
}
#end
#macro ForceArrow (Length,NameSymbol) // Fat arrow with symbol for indicating forces
merge {
difference {
box {<-1,-1,-.001>,<0,0,.001> rotate <0,0,45> scale <1,2,1>}
plane {<0,1,0>,-.5}
translate <0,Length,0>
}
box {<-.1,0,-.01>,<.1,Length-.5,.01>}
#object {NameSymbol
translate <0,
Length/2+(min_extent(NameSymbol).y-max_extent(NameSymbol).y)/2
,0>
}
pigment {color rgb 0}
no_shadow
no_reflection
}
#end
// The scenario:
box {<.3,2,-1000>,<.7,3,1000> texture {WoodTxt(0)}} // Wooden beam
merge { // End of rope tied around the wooden beam:
cylinder {<.77,3,0>,<.77,2,0>,.07} // Down the far side of the beam
intersection { // Around farthest, upper corner on beam
torus {.07,.07}
box {<0,-1,-1>,<1,1,0>}
rotate <90,0,0>
translate <.7,3,0>
}
cylinder {<.3,3.07,0>,<.7,3.07,0>,.07} // Horizontal part above beam
intersection { // Around the nearest, upper corner on beam
torus {.07,.07}
box {-1,<0,1,0>}
rotate <90,0,0>
translate <.3,3,0>
}
cylinder {<.23,3,0>,<.23,2,0>,.07} // Down the near side of the beam
difference { // Around the nearest, lower corner on beam
torus {.07,.07}
plane {<0,0,1>,0}
plane {<0,0,-1>,0 rotate <0,25,0>}
rotate <90,0,0>
translate <.3,2,0>
}
cylinder {<-.07,0,0>,<-.07,-.7,0>,.07 // From nearest lower corner on
rotate <0,0,25> translate <.3,2,0> // the beam down to the knot
}
cylinder {<.07,0,0>,<.07,-.7,0>,.07 // From farthest lower corner on
rotate <0,0,-25> translate <.7,2,0> // the beam down to the knot
}
#local Count=0; // The knot just underneath the wooden beam
#while (Count<5)
torus {.1,.07 translate <.5,1.45-.14*Count,0>}
#local Count=Count+1;
#end
texture {RopeTxt(0)}
}
#object {Tackle(0)} // Tackle in upper position, at full "color density"
#object {Tackle(.7) translate <0,-6,0>} // "Whited-out" tackle at lower position
#object {LengthArrow(6, // Indicating the length "s" the weight travels
text {ttf "cmmi10.ttf"
"s",.001,0 translate <.1,0,0>}
) translate <1.2,-8.3,0>}
#object {LengthArrow(12, // Indicating the length "2s" the hook travels
union {
text {ttf "cmr10.ttf"
"2",.001,0 translate <-.95,0,0>}
text {ttf "cmmi10.ttf"
"s",.001,0 translate <-.45,0,0>}
}
) translate <-1.4,-3.28,0>}
#object {ForceArrow(4, // Indicating the lifting force "F" on the weight
text {ttf "cmmi10.ttf"
"F",.001,0 translate <-.85,0,0>}
)
translate <-1,-8.8,0>
}
#object {ForceArrow(2, // Indicating the force "F/2" excerted on the rope end
union {
text {ttf "cmmi10.ttf"
"F",.001,0 translate <.3,.9,0>}
box {<.2,.70,0>,<1.1,.74,.001>}
text {ttf "cmr10.ttf"
"2",.001,0 translate <.4,-.1,0>}
}
)
translate <.3,7,0>
}
// background {color rgb 1} // Provides the white backdrop
camera { // Camera: Indicates where the scenario is
up <0,1,0> // seen from, and where the viewer "looks"
right <.25,0,0>
location <-5,5,-30>
look_at <-.3,.37,0>
angle 8.4
}
light_source {<-1000,2500,-2000> color rgb 1} // Illumination
Filhistorik
Klik på en dato/tid for at se filen som den så ud på det tidspunkt.
| Dato/tid | Miniaturebillede | Dimensioner | Bruger | Kommentar | |
|---|---|---|---|---|---|
| nuværende | 5. aug. 2012, 22:38 | 1.000 × 4.000 (657 KB) | Morn | transparent background | |
| 4. aug. 2012, 23:37 | 1.000 × 4.000 (614 KB) | Morn | redone at higher resolution and with Computer Modern TTF fonts | ||
| 16. apr. 2005, 00:15 | 250 × 1.000 (77 KB) | Peo~commonswiki | Shows the principle, forces and travelling distances in a basic tackle. Rendered using POV-Ray (see heep://www.povray.org/) and the scene description code shown below. This image comes complete with annotations; lettes, numbers and arrows. Because of thi |
{kind=link}
{kind=link}
Filanvendelse
Der er ingen sider der bruger denne fil.
Global filanvendelse
Følgende andre wikier anvender denne fil:
- Anvendelser på nl.wikipedia.org
- Anvendelser på pt.wikibooks.org
{kind=link}